中国教育在线
中国教育在线



北京大学工学院先进制造与机器人系王启宁教授课题组在智能动力下肢假肢方面取得重要突破,提出一种受马尾草启发的折纸软体动力膝关节假肢,这是国际首款软体膝关节假肢。研究为下肢假肢的设计提供了全新的思路,研究成果以“Bioinspired Origami-based Soft Prosthetic Knee”为题,于近日发表在国际重要期刊Nature Communications上。该论文的第一作者为北京大学工学院博士生高思源,王启宁教授为唯一通讯作者。


膝关节假肢设计的主要目标是既满足残疾人日常基本的行动功能需求,如在平地、崎岖路面、楼梯、斜坡上行走等功能,又保证用户穿戴的舒适性,具备如轻便、仿生、减震、以及定制化等特性。目前,膝关节假肢都是刚性假肢,采用高密度的金属材料制成,且各部分功能机构相对独立,在提高功能性的同时会增大系统体积、重量,且刚性框架的缓冲性能也十分有限,很难兼顾功能性和舒适性。近年来,软体材料的高度发展有望为机器人领域提供创新的解决方案和功能上的增强。其固有的低密度、柔顺性、缓冲性和便于3D 打印的特性使软体机器人具备轻便、柔顺、减震、便于制造等特点,这十分契合膝关节假肢对于穿戴舒适性的设计要求。然而,软体材料的高柔顺性也导致其结构在运动和承重时会产生无法避免的非必要形变,这一方面不利于建模计算和运动控制,另一方面导致结构难以承受人体重量,阻碍了软体机器人在膝关节假肢上的应用。
首次提出基于折纸的仿生软体膝关节假肢
本研究首次提出了基于折纸的仿生软体膝关节假肢,如图1所示,假肢包含了折纸结构、表面加固块、大腿、小腿连接模块。所提出软体假肢主体由热塑性聚氨酯3D打印制成,膝关节单元重量仅有300g,假肢高度仅为15cm。折纸结构由正面折纸结构和背面折纸结构组合而成。利用折纸结构的大范围折展特性,可以满足膝关节大范围运动的要求。
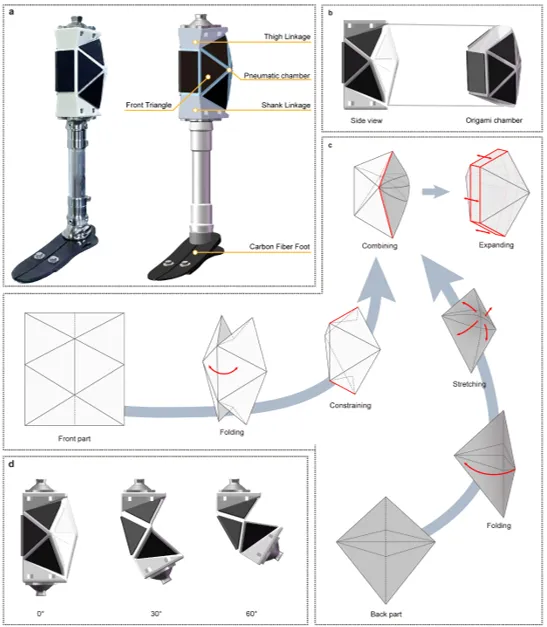
图1. 折纸软体膝关节总览
仿生多中心折纸膝关节设计
本研究提出一种具有变转动中心性质的折纸结构,如图2所示,其中虚线为谷线,实线为山线,红色虚线为辅助线。沿山线和谷线折叠,并使A1B 和A2B、D1C 和D2C 分别重合,即可形成如图2(b)所示的3D 折纸结构。
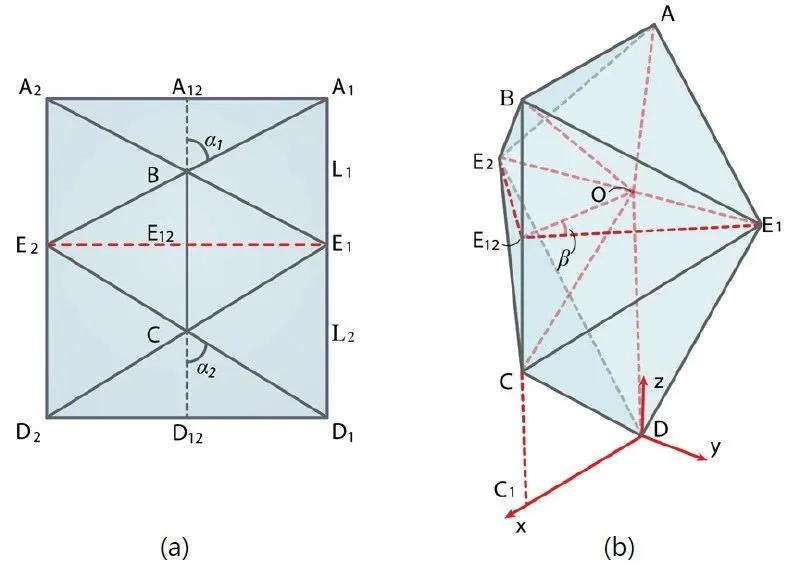
图2. 正面折纸结构折痕设计图
其中,AB和CD分别定义为大腿杆和小腿杆,L1、L2、α1、α2、β 均为折痕设计参数,通过改变这几个参数,可以调整折纸构型以及结构上、下部分的不对称度,如图3所示。该不对称度影响着折纸膝关节的屈膝角度变化、最大屈膝角度、以及膝关节转动瞬心的曲线样貌,通过调整这些设计参数拟合人体膝关节转动中心,即可实现仿人的膝关节多中心转动。
图3. ABE12及DCE12在3D折纸结构折展过程中的变化与α1、α2、β 的关系
仿马尾草抗弯折机制的软体结构设计
马尾草是一种常见的具有管状结构的植物,这种植物有些可以长到5米高,但是只有2厘米粗,如图4所示,通过对其茎的截断面进行观察,可以看到一个由薄的外环强化组织和更厚的内环软组织组成的结构,在马尾草被弯折的时候,外环形成的管状结构受挤压,使得内部软组织细胞内压上升,从而提高结构刚度抵抗弯折。进一步观察可以发现,在髓腔生长过程中,管状结构内壁上会形成褶皱结构,在结构应力最集中的部位,褶皱处会进一步凹陷,挤压局部细胞,使细胞内压进一步上升,从而提高局部结构强度。由此,本研究总结出马尾草抗弯折的两大关键机制,即流体压制稳定和受压内凹结构。
为了模仿马尾草抗弯折的机制,提高软体结构的承重能力,本研究设计了背面折纸结构,与正面折纸结构共同组成一个软体气动腔体,利用气腔气压模拟马尾草的细胞液压。通过调整正面和背面的折痕相对于压力方向的夹角,使正面折纸结构在承受压力时相对刚度更大,来模仿马尾草中外环强化组织的作用。随着气腔内气压的上升,软体折纸结构的整体刚度提升,从而抵抗外部压力,维持结构稳定。通过对气腔预充气压的调节,我们可以调整软体膝关节结构的刚度,以应对不同程度的压力。进一步地,通过对背面结构的折痕设计,结合正面折纸结构变形时两侧张开、上下压缩的同步运动特点,使背面折纸结构在顺应正面结构运动的同时产生由外凸向内凹的运动变化,从而进一步压缩气腔体积,模仿马尾草髓腔褶皱受压内凹的机制,进一步增强软体假肢的抗压能力。
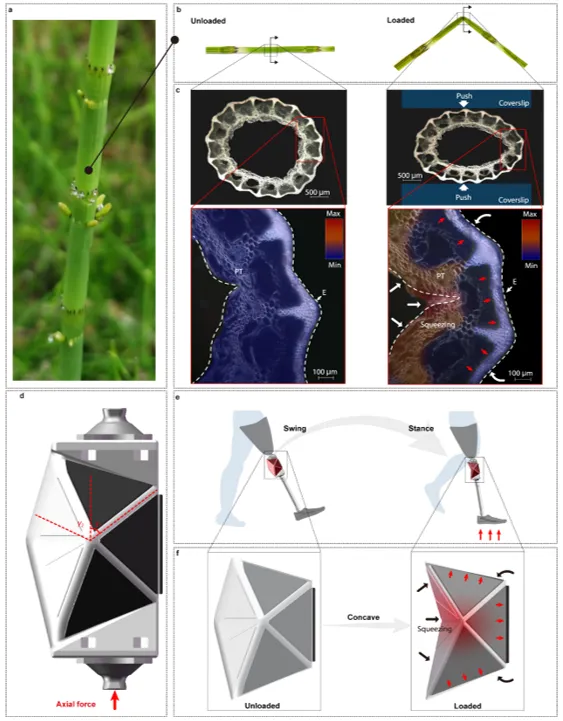
图4. 仿马尾草抗弯折机制的软体结构设计
本研究采用通过对折纸结构折面部分的加固,可以有效约束折面的非必要形变,从而将形变误差限制在折痕部分,由于折痕只占折纸结构很小的一部分,因此通过加固折面可以有效降低结构整体的非必要形变量,提高运动精度。
软体膝关节假肢测试
通过实验台实验,本研究先后对软体膝关节假肢的气动控制、瞬心轨迹拟合程度、多维冲击吸收、承载能力、力矩输出能力进行了测试。如图5所示,结果表明,折纸结构可以模仿人体膝关节变转动中心运动,软体膝关节假肢可以在气压驱动下进行较为精准的运动,实际运动与理论计算接近,驱动带宽满足残疾人快速行走的要求。软体假肢面对不同方向的外部冲击,都比刚性假肢具有更强的缓冲能力(可多吸收11.5%至17.3%的冲击力)。所提出的软体膝关节假肢可以在较低的预充气压下承载超过75kg的重量(其自重的250倍),并能主动输出超过25Nm的伸膝力矩。
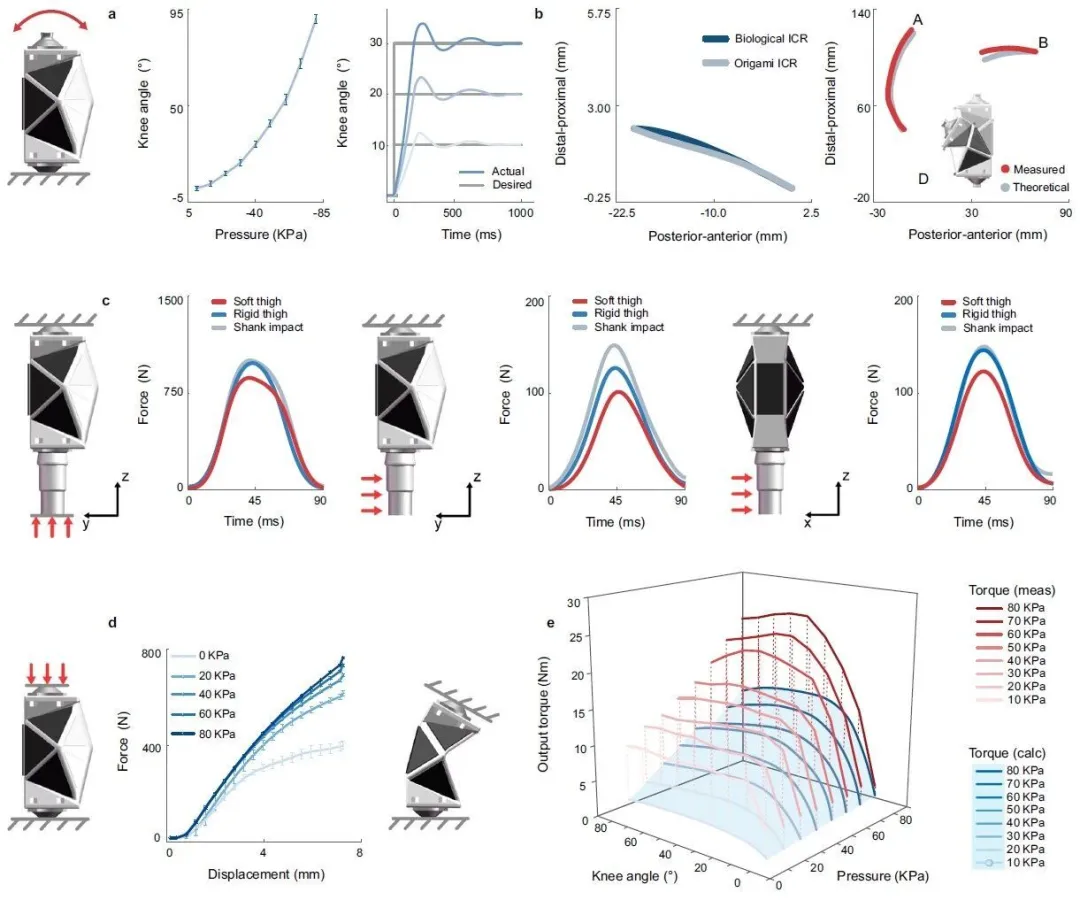
图5. 实验台实验结果
此外,本研究邀请三名残疾人被试参加一系列行走实验,如1 m/s和1.25 m/s跑步机行走、上、下15 cm台阶、上、下10°斜坡、跨越障碍等。图6展示的是残疾人分别穿戴软体假肢和日常使用的刚性假肢在跑步机上以1 m/s和1.25 m/s的速度行走的实验结果,实验采集了残疾人残侧和健侧的关节角度、肌肉激活程度、足底压力、假肢对地面冲击力和振幅的的吸收,并进行了步态对称性分析。结果表明,尽管残疾人对软体假肢不熟悉,仍可以穿戴软体膝关节假肢以正常步速和较快步速进行行走,并具有更好的步态对称性,残疾人不仅更省力,受到的冲击也更小,主观上也认为行走时的舒适度更高。
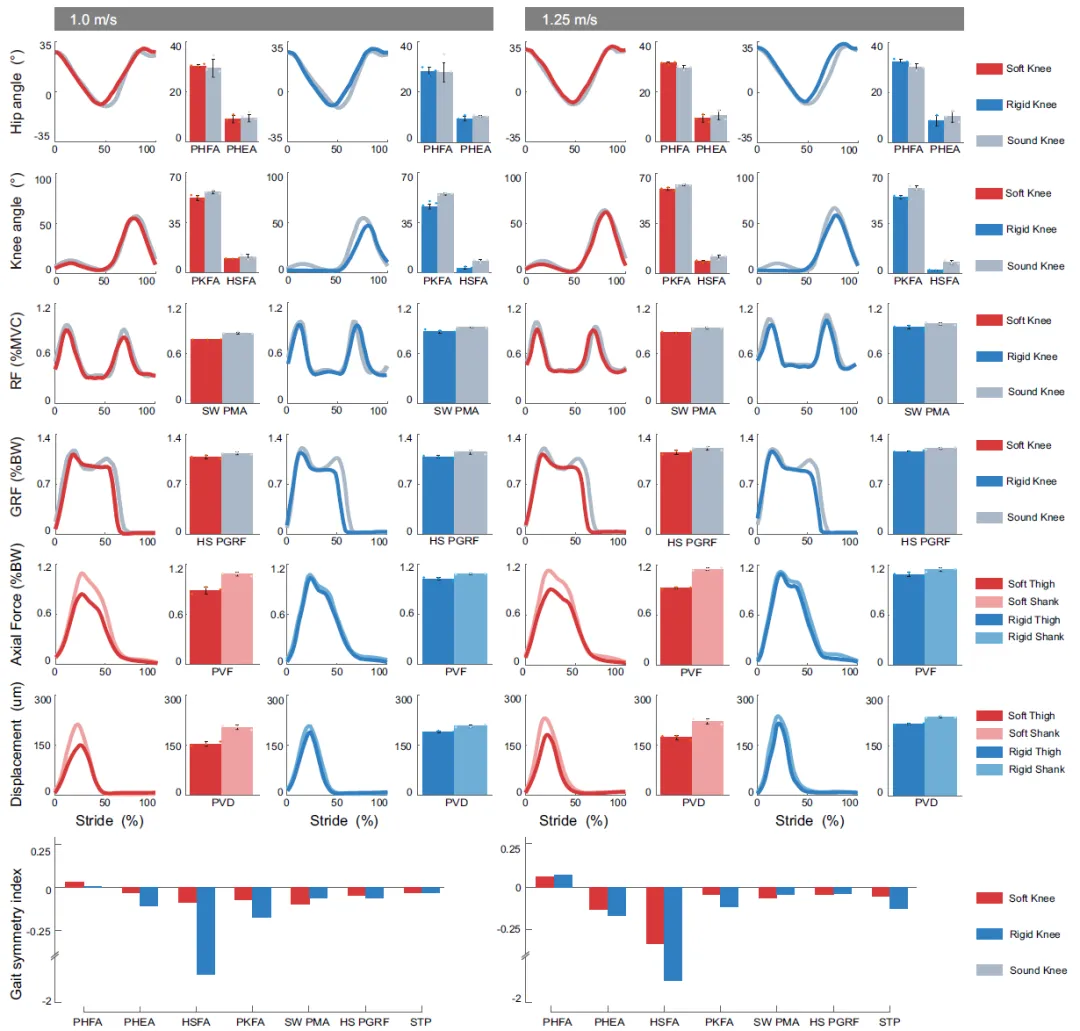
图6. 残疾人跑步机行走实验结果
在多地形行走实验中,本研究主要采集了残疾人的关节角度变化数据,旨在验证软体假肢的多功能性。如图7所示,实验结果表明,软体膝关节假肢可以支持残疾人进行交替腿上、下楼梯/斜坡,并能够连续跨越障碍物,假肢可以识别残疾人的运动意图并提供充分的运动范围和力。
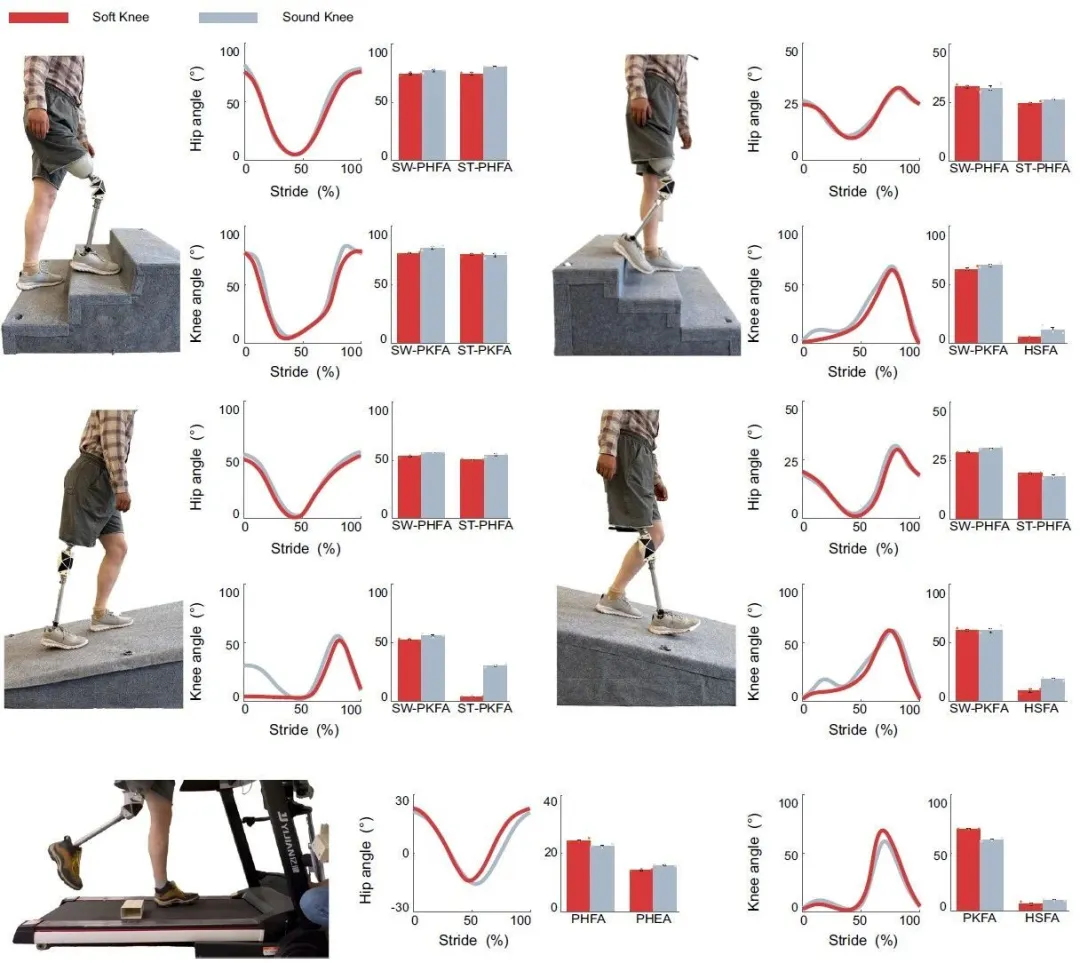
图7. 残疾人多地形行走实验结果
本研究提出了首款软体膝关节假肢,为下肢假肢的设计提供了全新的思路。假肢设计者和研究人员们可以不受传统机械设计的限制,采用全新的设计方法设计假肢。适用于软体下肢假肢应用场景的新材料、新驱动、新传感的开发也将为软体机器人的发展注入新鲜血液。基于3D打印等新制造方法的定制化下肢假肢制造也将成为研究热点,快速且低成本的制造会加快技术迭代并降低研发门槛。研究人员们相信,软体膝关节假肢的实现将会开启一个全新的交叉研究领域。
该论文的第一作者为北京大学工学院博士生高思源,北京大学工学院王启宁教授为唯一通讯作者。合作者包括康复大学杨承旭博士、北京大学工学院硕士生陈鸿汀、北京大学生命科学学院贺新强教授、北京大学工学院阮乐成博士。相关研究得到了国家自然科学基金委的资助。
① 凡本站注明“稿件来源:中国教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:中国教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。